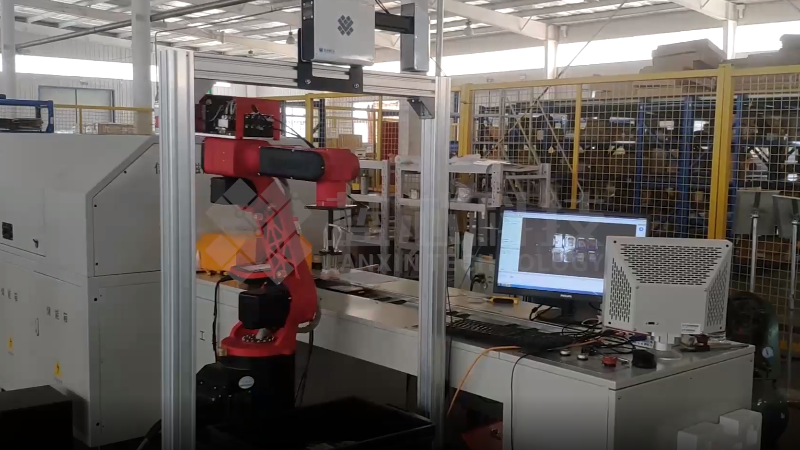
전통적인 3C 산업의 로딩 및 언로딩 단계는 작업자가 미가공 컴퓨터 하드디스크를 박스에서 꺼내 하나씩 컨베이어 벨트에 올려 가공하고 가공 완료 후 가동된 금속품을 다시 박스에 담기에 효율이 낮다. 고객은 로봇이 촘촘히 쌓인 공작물을 하나씩 집어 컨베이어 벨트에 올려 놓기를 희망하였다.
솔루션
LXPS-HS0232-B 3D 비전 센서, 맞춤형 로봇 그랩 SDK 소프트웨어 V1.0, BORUNTE 로봇핸드.
비전 시스템
스마트 카메라 하드웨어, IPC, 마우스, 키보드 및 부대 소프트웨어(모니터 제외) 포함.
로봇핸드기구 등 집성부
BRTIRUS0805A,IP.TCP통신 프로토콜 지원.
작업절차
팔렛트에 담긴 하드디스크를 인식하고, 그랩한 하드디스크의 3개 좌표정보와 수평회전각도를 로봇암에 전송하며 로봇암이 제공된 정보에 따라 하드디스크를 그랩함으로써 하드디스크 그랩 목적의 응용을 실현한다.
1. 자재 공급 방식 수동 로딩: 회전 박스에 담긴 제품을 꺼낸 후 시스템에서 제시하고 수동으로 자재 박스를 교체한다.
2. 로봇 핸드가 꺼낸 후 수송 라인의 자재 홈에 넣으면 수송 라인이 1회 일시 중지되고 정위치 정착 후 계속 돌아간다.
3. 로봇 핸드의 1개 왕복 순환 주기는 약 7초이며 비전 처리 시간을 더하면 총 순환 시간은 8-9초이다.