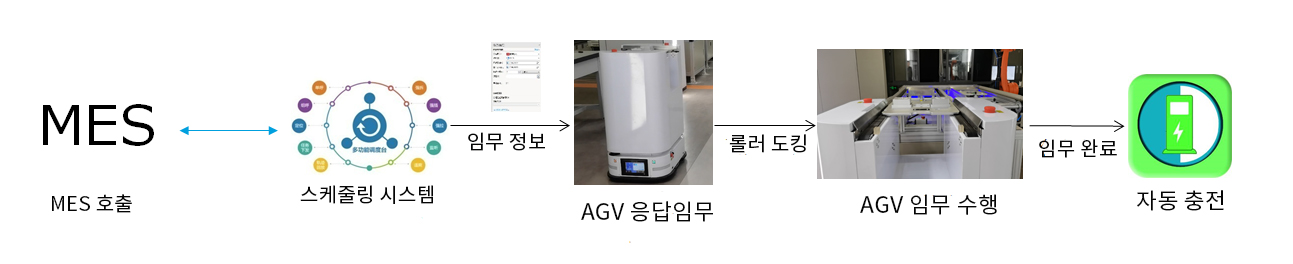
고객 공장의 반도체 단말 생산 라인에서 맞춤형 롤러 운반 로봇 물류 응용 시스템을 배치하려면 휴먼 머신 하이브리드, 멀티 플랫폼 협동 방식을 통하여 선착장과의 직접적인 통신(광통신 센서)과의 도킹을 실현하고 운반 로봇이 정위치 도착 후 스케줄링 시스템을 통해 MES 정보와 인터렉션, 도킹을 완성해야 한다.
솔루션
이 단계에서 인력 투입을 통한 반복 배송으로 부가가치가 없는 현황에 대해 이중 롤러 AMR을 사용하여 연결 플랫폼과 협력, 반도체 자재의 자동 로딩 및 언로딩 운송을 실현한다.