












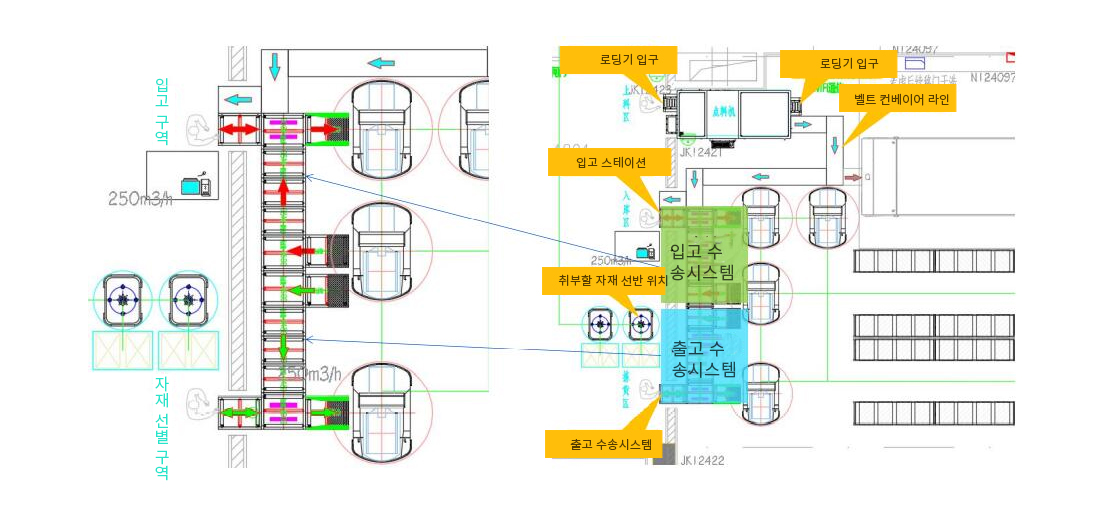
입고 절차:
1. 시스템에서 입고 임무 배포
2. 로봇이 빈 자재 박스(또는 반 박스)를 컨베이어 라인의 연결 포트로 운송
3. 로봇이 컨베이어 라인과 도킹하여 자재 박스를 컨베이어 라인에 언로딩하며 컨베이어 라인을 통해 입고 작업대로 이송
4. 자재를 자재 박스에 수작업으로 충진 후 코드 스캔 및 바인딩하고 수송 라인을 통해 입고 연결 포트로 이송
5. 로봇이 가득 찬 자재 박스를 창고구역으로 운반
출고 절차:
1. 시스템에서 출고 임무 배포
2. 로봇이 임무에 필요한 자재 박스를 수송 라인의 연결 포트에 운반
3. 로봇이 수송 라인과 도킹하여 자재 박스를 수송 라인에 언로딩 후 수송라인에서 다시 출고 작업대로 이송
4. 출고 임무 오더에 따라 수작업으로 자재 선별
5. 선별 완료 후 수송 라인을 통해 잔존 자재를 다시 창고 반납 연결 포트로 이송
6. 로봇이 가득 찬 자재 박스를 창고구역으로 운반




